Екзоскелет та штучний інтелект допоможуть після травм

Наслідками інсульту та інших нейротравм часто стають порушення координації, сили та чутливості кінцівок. Вчені з Флориди розробили м’яку роботизовану рукавичку зі ШІ, яка може допомогти таким пацієнтам у відновленні дрібної моторики.
Зниження функціональності рук і ніг – часте явище у пацієнтів з інсультами, ушкодженнями плечового нервового сплетіння, церебральними паралічами та іншими нейропатологіями. Одним з основних компонентів сучасної реабілітації є використання роботизованих екзоскелетів із жорсткою та м’якою структурою.
Вчені з Атлантичного університету Флориди, Медичного коледжу Університету Флориди та Державного університету Бойсе створили м’яку роботизовану рукавичку з алгоритмами машинного навчання, яка підвищує спритність рук і навіть може допомогти знову навчитися грати на фортепіано.
Для людей, які втратили здатність грати через нейротравму, м’які роботизовані екзоскелети можуть стати потужним допоміжним засобом (Hoang et al., 2021). Гнучкість м’яких матеріалів та датчиків дозволяє екзоскелетам адаптуватися до форми та руху руки, забезпечуючи точну силу. Також ми підготували посібник, щоб допомогти пацієнтам відновити тонкі рухи пальців, необхідні для гри на фортепіано (Takahashi et al., 2020). Однак для досягнення точного контролю сили та адаптивності потрібна розробка високоінтелектуальних алгоритмів для вирішення проблем планування рухів (Wang and Chortos, 2022)йдеться у дослідженні
Чим відрізняється м’яка ШІ-рукавичка від інших екзоскелетів?
Екзоскелети для реабілітації пацієнтів з нейротравмами – це відносно новий винахід, який вже набув великого поширення. Традиційні системи є негнучкими механічними структурами, оснащеними електродвигунами. Такі моделі – точні та ефективні, але маломобільні та переважно застосовуються у фізіотерапії або для пацієнтів, які використовують інвалідний візок. Ще один недолік – неможливість у всіх ситуаціях правильно розподілити силу, щоб забезпечити комфорт і безпеку користувача.
Оптимальною альтернативою жорстким та неергономічним системам стали м’які роботизовані екзоскелети з гнучких матеріалів із сенсорними датчиками. Вони відстежують рухи пацієнтів, реагують на них і навіть пропонують зворотний зв’язок, допомагаючи коригувати їх у режимі реального часу.
Для гри на фортепіано, як і для багатьох інших складних кваліфікованих рухів, потрібна добре розвинена дрібна моторика. Якщо необхідно відновити ці навички, саме м’які роботизовані рукавички зі ШІ можуть стати потрібними інструментами. Вони адаптуються до індивідуальних особливостей руки (форма, характер рухів тощо) і контролюють силу, що докладається.
У ході дослідження, опублікованого в мультидисциплінарному журналі Frontiers in Robotics and AI, вчені з Флориди розробили інтелектуальний допоміжний екзоскелет руки для активного згинання і пасивного розгинання всіх п’яти пальців. Він складається з п’яти м’яких пневматичних приводів із гнучкими датчиками на кінчиках пальців. До відмінних рис цієї системи належать:
- використання матеріалу Dragon Skin-30, який надає кожному пальцю свободу поперечних рухів у площині долоні;
- виготовлення екзоскелету з використанням надрукованих на 3D-принтері стентів з полівінілового спирту та виливків з гідрогелю для об’єднання п’яти приводів в один пристрій для носіння, що є зручним для користувача;
- можливість адаптувати конструкцію до індивідуальних особливостей анатомії пацієнта завдяки 3D-скануванню або комп’ютерній томографії;
- присутність у зоні кінчика кожного пальця гнучких матриць датчиків для розпізнавання образів гри на фортепіано;
- ШІ для виявлення різниці між правильним та неправильним відтворенням мелодії.
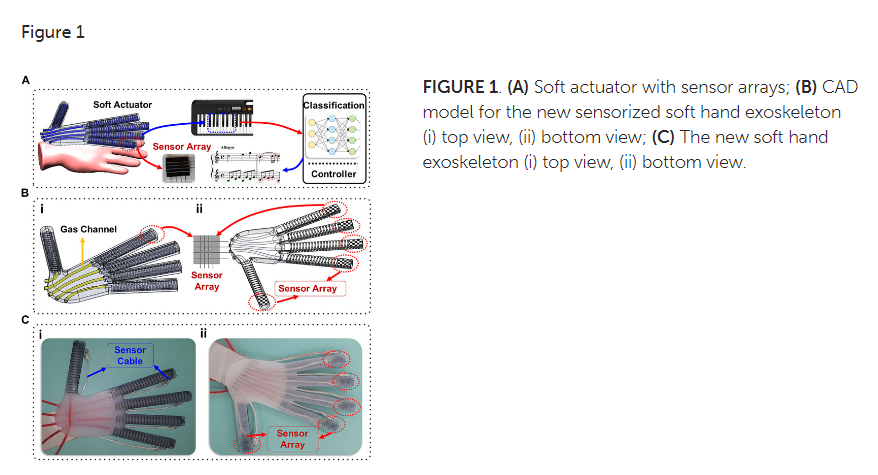
Малюнок 1. (А) – м’який привод з масивами датчиків, (В) – CAD-модель для нового сенсорного екзоскелету м’якої руки (і) вид зверху, (ii) вид знизу, (С) – новий м’який екзоскелет руки (і) вид зверху, (іі) вид знизу Джерело: https://www.frontiersin.org/
Екзоскелет, який відчуває різницю під час відтворення музики
Для оцінки можливостей роботизованої рукавички науковці запрограмували 10 різних варіантів виконання пісні «У Мері було ягня». Вони створили пул з помилок 12 видів, що виникали на початку або наприкінці відтворення мелодії або внаслідок порушення синхронізації. У результаті десять різних варіацій пісні складалися з трьох груп по три варіації у кожній плюс правильна пісня, зіграна без помилок. Результати відтворення використовувалися як база для трьох алгоритмів класифікації машинного навчання KNN, RF і ANN.
У ході дослідження мелодія повторювалася екзоскелетом, який носила людина (працездатний чоловік 25 років), та системою без носія. Найвищий результат продемонстрував алгоритм ANN: його точність при виявленні помилок під час тестування людиною становила 97,13% ± 2,00%, а за незалежного тестування – 94,60% ± 1,26%.
У минулому для гри на піаніно використовувалися інші м’які роботизовані приводи; проте наш привод продемонстрував здатність «відчувати» різницю між правильними та неправильними версіями однієї й тієї ж пісні, — зазначено у дослідженні. — У нашому м’якому роботизованому ручному приводі використовувалося машинне навчання, навчене масивами тактильних датчиків, які можна було використовувати для надання інформативного зворотного зв’язку як для користувачів, так і для лікарів. Це робить його ідеальним інструментом, який допомагає людям з обмеженими можливостями навчитися правильно грати на фортепіано.