Enhancing Fine Motor Skills: Exoskeletons for Rehabilitation

Strokes and various neurotraumas often lead to impairments in coordination, strength, and limb sensitivity. A team of Florida-based scientists have designed an AI-powered soft robotic glove, aiming to assist patients in regaining their fine motor abilities.
Impaired hand and leg functionality is not uncommon in patients suffering from strokes, brachial plexus injuries, cerebral paralysis, and other neuropathologies. One of the principal aspects of contemporary rehabilitation includes the utilization of robotic exoskeletons, featuring both rigid and soft structures.
Researchers from Florida Atlantic University, the University of Florida College of Medicine, and Boise State University have innovated a soft robotic glove with integrated machine learning algorithms. This cutting-edge device not only enhances hand dexterity, but can even potentially aid patients in relearning how to play the piano.
Playing the piano requires complex and highly skilled movements. For individuals who have lost the ability to play due to neurotrauma, soft robotic exoskeletons can serve as powerful assistive tools (Hoang et al., 2021). The flexibility of soft materials and sensors enables the exoskeletons to adapt to the shape and motion of the hand, providing precise force and guidance to aid patients in recovering the fine finger movements required for piano playing (Takahashi et al., 2020). However, achieving precise force control and adaptability requires the development of highly intelligent algorithms to address motion planning issues (Wang and Chortos, 2022)as stated in the research
What sets the AI-powered soft glove apart from other exoskeletons?
Exoskeletons intended for neurotrauma patient rehabilitation are relatively new innovations that have quickly become widespread. Conventional systems are rigid mechanical structures equipped with electric motors. While these models offer precision and efficiency, they lack mobility and are predominantly employed in physiotherapy or by patients who rely on wheelchairs. Another drawback is their inability to distribute force correctly under all circumstances, jeopardizing user comfort and safety.
Soft robotic exoskeletons, made from flexible materials with sensory detectors, have emerged as an optimal alternative to these stiff, non-ergonomic systems. These devices monitor patient movements, respond accordingly, and even provide feedback, facilitating real-time movement adjustments.
For activities like piano playing, as well as many other intricate, skilled movements, a high degree of fine motor control is required. When it becomes necessary to relearn these skills, AI-enabled soft robotic gloves can prove to be suitable instruments. They adapt to the unique characteristics of the hand, such as its shape and movement patterns, and meticulously manage the applied force.
In a study published in the multidisciplinary journal Frontiers in Robotics and AI, scientists from Florida developed a smart hand exoskeleton that actively flexes and passively extends all five fingers. The device comprises five soft pneumatic actuators with flexible sensors at the fingertips. The distinct features of this system include:
- Utilization of Dragon Skin-30 material, allowing each finger lateral freedom of movement within the palm's plane.
- The exoskeleton's construction involves 3D-printed stents made from polyvinyl alcohol and hydrogel castings that combine the five actuators into a single wearable device, convenient for the user.
- The design can be adapted to a patient's unique anatomical features using 3D scanning or computer tomography.
- The presence of flexible sensor arrays at the tip of each finger for recognizing piano playing patterns.
- The integration of AI to distinguish between correct and incorrect renditions of a melody.
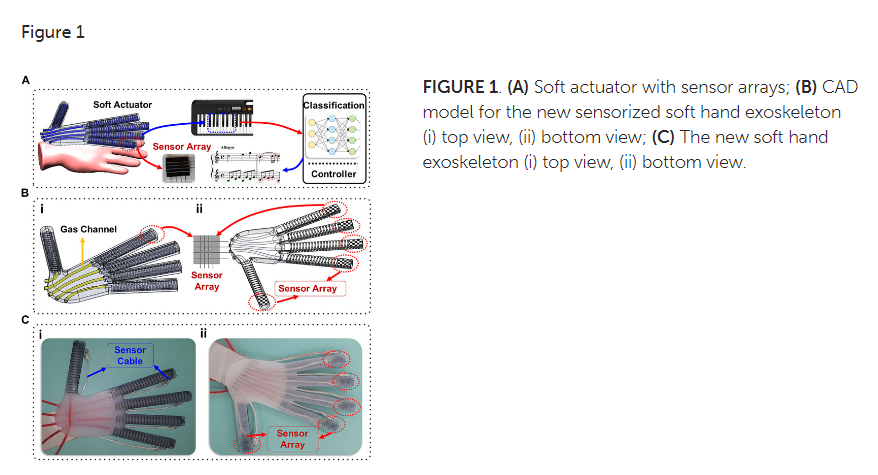
Figure 1. (A) – A soft actuator with sensor arrays, (B) – CAD model for the new sensorized soft hand exoskeleton (i) top view, (ii) bottom view, (C) – the new soft hand exoskeleton (i) top view, (ii) bottom view. Source: https://www.frontiersin.org/
Exoskeleton that Senses Variations in Music Playback
To assess the capabilities of the robotic glove, the researchers programmed ten different versions of "Mary Had a Little Lamb". They created a pool of twelve types of errors that could occur at the beginning or end of the melody, or due to synchronization issues. Consequently, the ten different versions consisted of three groups with three variations each, plus the correct version of the song, played without errors. The performance results were used as a dataset for three machine learning classification algorithms: KNN, RF, and ANN.
Throughout the study, the melody was repeated by the exoskeleton, worn by a human (a 25-year-old male), and by the system without a wearer. The ANN algorithm demonstrated the best performance: its accuracy in error detection when tested by a human was 97.13% ± 2.00%, and during independent testing – 94.60% ± 1.26%.
In the past, other soft robotic actuators have been used to play the piano; however, ours is the only one that has demonstrated the capability to ‘feel’ the difference between correct and incorrect versions of the same song. However, our soft robotic hand actuator utilized machine learning trained by tactile sensor arrays that could be used to provide instructive feedback to users and useful data for clinicians. This makes it an ideal tool to assist disabled individuals in relearning how to play the piano correctly.