Экзоскелет и искусственный интеллект помогут после травм

Последствиями инсульта и других нейротравм часто являются нарушение координации, силы и чувствительности конечностей. Ученые из Флориды разработали мягкую роботизированную перчатку с ИИ, которая может помочь в восстановлении мелкой моторики таким пациентам.
Снижение функциональности рук и ног – нередкое явление у пациентов с инсультами, повреждениями плечевого нервного сплетения, церебральными параличами и другими нейропатологиями. Одним из основных компонентов современной реабилитации является использование роботизированных экзоскелетов с жесткой и мягкой структурой.
Ученые из Атлантического университета Флориды, Медицинского колледжа Университета Флориды и Государственного университета Бойсе создали мягкую роботизированную перчатку с алгоритмами машинного обучения, которая повышает ловкость рук и даже может помочь заново научиться играть на фортепиано.
Для людей, которые потеряли способность играть из-за нейротравмы, мягкие роботизированные экзоскелеты могут служить мощным вспомогательным средством (Hoang et al., 2021). Гибкость мягких материалов и датчиков позволяет экзоскелетам адаптироваться к форме и движению руки, обеспечивая точную силу. Также мы подготовили руководство, чтобы помочь пациентам восстановить тонкие движения пальцев, необходимые для игры на фортепиано (Takahashi et al., 2020). Однако для достижения точного контроля силы и адаптивности требуется разработка высокоинтеллектуальных алгоритмов для решения проблем планирования движений (Wang and Chortos, 2022)говорится в исследовании
Чем отличается мягкая ИИ-перчатка от других экзоскелетов?
Экзоскелеты для реабилитации пациентов с нейротравмами – это относительно новое изобретение, которое уже получило широкое распространение. Традиционные системы представляют собой негибкие механические структуры, оснащенные электродвигателями. Такие модели – точные и эффективные, но маломобильные и преимущественно применяются в физиотерапии или у пациентов, использующих инвалидную коляску. Еще один их недостаток – невозможность во всех ситуациях правильно распределить силу, чтобы обеспечить комфорт и безопасность пользователя.
Оптимальной альтернативой жестким и неэргономичным системам стали мягкие роботизированные экзоскелеты из гибких материалов с сенсорными датчиками. Они отслеживают движения пациентов, реагируют на них и даже предлагают обратную связь, помогая корректировать их в режиме реального времени.
Для игры на фортепиано, как и для выполнения многих других сложных квалифицированных движений, требуется хорошо развитая мелкая моторика. При необходимости восстановить эти навыки именно мягкие роботизированные перчатки с ИИ могут стать подходящими инструментами. Они адаптируются к индивидуальным особенностям руки (форма, характер движений и др.) и контролируют прилагаемую силу.
В ходе исследования, опубликованного в мультидисциплинарном журнале Frontiers in Robotics and AI, флоридские ученые разработали интеллектуальный вспомогательный экзоскелет руки для активного сгибания и пассивного разгибания всех пяти пальцев. Он состоит из пяти мягких пневматических приводов с гибкими датчиками на кончиках пальцев. К отличительным особенностям этой системы относятся:
- использование материала Dragon Skin-30, который предоставляет каждому пальцу свободу поперечных движений в плоскости ладони;
- изготовление экзоскелета с использованием напечатанных на 3D-принтере стентов из поливинилового спирта и отливки из гидрогеля для объединения пяти приводов в одно носимое устройство, удобное для пользователя;
- возможность адаптировать конструкцию к индивидуальным особенностям анатомии пациента благодаря 3D-сканированию или компьютерной томографии;
- присутствие в зоне кончика каждого пальца гибких матриц датчиков для распознавания образов игры на фортепиано;
- ИИ для выявления разницы между правильным и неправильным воспроизведением мелодии.
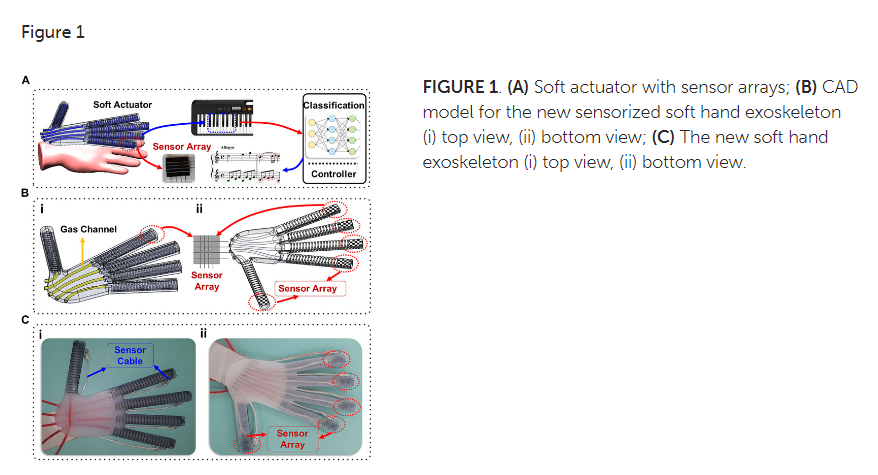
Рисунок 1. (А) – мягкий привод с массивами датчиков, (В) – CAD-модель для нового сенсорного экзоскелета мягкой руки (і) вид сверху, (іі) вид снизу, (С) – новый мягкий экзоскелет руки (і) вид сверху, (іі) вид снизу. Источник: https://www.frontiersin.org/
Экзоскелет, который чувствует разницу при воспроизведении музыки
Для оценки возможностей роботизированной перчатки ученые запрограммировали 10 разных вариантов исполнения песни «У Мэри был ягненок». Они создали пул из ошибок 12 видов, которые возникали в начале или в конце воспроизведения мелодии или в результате нарушения синхронизации. В итоге десять различных вариаций песни состояли из трех групп по три вариации в каждой плюс правильная песня, сыгранная без ошибок. Результаты воспроизведения использовались в качестве базы для трех алгоритмов классификации машинного обучения KNN, RF и ANN.
В ходе исследования мелодия повторялась экзоскелетом, который носил человек (трудоспособный мужчина 25 лет), и системой без носителя. Наивысший результат продемонстрировал алгоритм ANN: его точность при выявлении ошибок при тестировании человеком составила 97,13% ± 2,00%, а при независимом тестировании – 94,60% ± 1,26%.
В прошлом для игры на пианино использовались другие мягкие роботизированные приводы; однако наш привод продемонстрировал способность «чувствовать» разницу между правильными и неправильными версиями одной и той же песни, — отмечено в исследовании. — В нашем мягком роботизированном ручном приводе использовалось машинное обучение, обученное массивами тактильных датчиков, которые можно было использовать для предоставления информативной обратной связи как для пользователей, так и для лечащих врачей. Это делает его идеальным инструментом, помогающим людям с ограниченными возможностями научиться правильно играть на фортепиано.